

はじめに
ほうれん草は、出荷までに要する全作業時間の8割を収穫調製作業に費やしており、人手による作業量の多い品目である。さらに、収穫調製作業はしゃがみ込んだ状態で行うために労働負荷が高く、その軽労化が求められている。そのため、機械導入による作業の自動化への期待は高い。
一方、ほうれん草は人手による収穫でも茎や葉を容易に折りやすいため、作物を傷つけずに機械収穫を実現することは非常に難しい。これに対して、生食用、あるいは加工用向けに、ほうれん草の自動収穫機械が開発・販売されており、根あるいは茎を切断し、地上から上部に自動的に回収搬送する機能を実現している。
しかし、圃場条件や対象品種によってはその性能を十分に発揮できない場合があるようである。そのため、夏季ほうれん草の産地である長野県においても、圃場条件や対象品種によらずに自動収穫可能な装置の開発が期待されている。
自動収穫・調製の課題がクリアされれば、生産効率が格段に向上し、結果として生産規模の拡大が期待できる。そこで、適用条件を出来る限り緩和した自動収穫装置の開発に着手した。平成30年度には、生産圃場での評価試験が可能なプロトタイプ機を開発したので紹介する。
ほうれん草自動収穫装置の開発目標
開発する自動収穫装置は、生食用と加工用の両者に対応可能とした。通常、生食用ほうれん草の収穫手順としては、以下が一般的である。
(ⅰ)鎌等で土中の根を切り、土から持ち上げる。その際、根は10mm程度残す。
(ⅱ)根を5 mm程度に切り揃える。さらに、根に付着した土を除去し、外葉や折れた葉を除去する。
(ⅲ)コンテナに一定量格納するなどしてラッピング作業場などに運搬する。
上記の手順のうち、開発する自動収穫装置では(i)の作業を実施させることを目標とし、(ii)や(iii)の調製作業等については、従前通りの手作業を前提とすることにした。これより、自動収穫装置の開発目標は次を想定した。
(1)5 mm以上の根を残した状態で土中において根を切り、根切り後のほうれん草を土から持ち上げ収穫する。
(2)収穫の際、茎や葉を傷つけない。
(3)人手による収穫作業より効率化を図る。前述の開発目標を想定した際、圃場条件として、次の条件を考慮した。
(4)土壌に小石などの異物が有る状況でも使用可能とする
(5)条間距離などの播種条件を問わない(隣接するほうれん草の葉の絡まりも許容する)
(6)ほうれん草の品種を問わない
(7)圃場の勾配を許容する
(8)雨除けのあるハウス栽培を前提とし、土壌条件(水分含有率など)は一定の条件を満たすように管理されている
以上の条件に対応している自動収穫装置やそれを実現する技術はこれまで開発されておらず、チャレンジングな目標設定である。装置の適用対象と想定している長野県の圃場では、条播きされているものの、生育後は隣接するほうれん草の葉が絡んでいたり、種がこぼれて意図しない位置で生育するものが有るなどの状態である。さらに、地面に凹凸があることから、ほうれん草の根元の位置がそれぞれ異なっている。
また、品種についても立性と非立性があり、さらには季節などの気候条件によっても生育の大きさや葉のたれ具合が変化する。それに加え、圃場には概ね5 deg程度の緩やかな勾配が存在する場合がある。
さらに、火山灰地の土壌であることから、土中には大小様々な大きさの石が存在する。装置の開発目標が実現できれば、これらの生産現場の制約をクリアできる。さらに、根がついたままで収穫できると、収穫後に雑草との分別が容易となる。その結果、生食用だけでなく加工用の自動収穫装置としての利用価値も高くなる。
開発中の自動収穫装置の収穫原理と構成概要
開発中の自動収穫装置の概要を図1に示す。

図 1 自動収穫装置の構成概要
収穫方法の概要は以下のとおりである。まず、一定幅のほうれん草を一括収穫するため、約750 mm幅の金属平板の刃を用いて根切りを行う。根切り刃は地中30 mmの位置に概ね保った状態で地中を進行させ、適切な根切り位置を確保する。そのため、地表面位置をセンサにより検知し、フィードバック制御によって根切り刃の位置や角度を自動制御する。
根切り刃の目標位置を地中30mmとする理由は、調製時にほうれん草の根を5 mm程度残して切り揃えるため、マージンを確保するためである。つまり、地面の勾配や根元の位置の変動など、様々な変動要因の影響で自動収穫後の根の長さにはばらつきが生じるが、収穫時の目標値30 mmと調製後の根の長さ5 mmとの差である25 mmによってそのばらつきを吸収することを目論んでいる。
一方、一定の深さを保ったまま金属平板を地中進行させるために、クローラによる推進力を活用する。よって、根はクローラの推進力によって押し切りされる。同時に、土中に小石などによる抵抗力が有ったとしても、クローラの推進力が勝っていれば石の影響を受けずにロバストに動作できる。根切り後のほうれん草はコンベア等により上部に搬送される。
その際、ほうれん草を把持や挟み込みなしに上部に持ち上げる。これにより、収穫搬送時にほうれん草の茎や葉を傷つけないばかりか、葉が広がる非立性の品種であっても収穫可能となる。その実現は、新たに考案したパッシブハンドリングの考え方に基づいている。
パッシブハンドリングとは、対象物に直接的ではない形で外力を加えて所望の動作を誘発させ、結果的に所望の動きを実現する間接的な制御方法である。これは、把持などによる拘束によって対象物を動かす能動的なハンドリングと対照的である。パッシブハンドリングの原理は非常に単純である。
たとえば、図2に示すように、根切り後のほうれん草は地中に根が残っているために依然として直立しているが、その状態でほうれん草の重心下部を押すと手前に倒れる。

図 2 パッシブハンドリングの原理
その際、倒れた位置にコンベアなどが存在すれば地上から上部に搬送することが可能となる。これは対象物を把持するなどして能動的にハンドリングするものではなく、対象物の動作を受動的に活用していることからパッシブハンドリングと呼んでいる。このシナリオは原理的には成り立つものの、その実現は必ずしも容易ではない。
特に、根切り刃の土中進行に伴って土が前方に堆積してしまうと、ほうれん草を上部に移動させることは難しくなる。そのため、根切り刃を土中進行させたとしても土が移動しないよう、根切り刃を経路追従させることが必要となる。したがって、根切り刃の土中進行経路設定は非常に重要である。
自動収穫装置プロトタイプ機の開発
平成30年度に、カイシン工業株式会社によって、ほうれん草自動収穫装置のプロトタイプ機が開発された。開発された装置は2種類である。土中で根を切断し、当初の開発目標通りにほうれん草を上部まで搬送させる自動収穫装置と、根を切るだけの機能をもった根切り装置である。
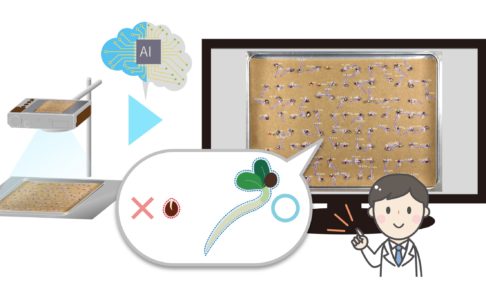
自動収穫装置を図3に示し、根切り装置を図4に示す。さらに、自動収穫装置の諸元を表1に示す。図3の自動収穫装置では、前述したシナリオで土中の根を切断し、コンベアを用いて上部に搬送・回収する。図3によれば、根を切断されたほうれん草の向きが揃った状態でコンベア上を順次搬送されている様子がわかる。

図 3 ほうれん草自動収穫装置(カイシン工業株式会社)

表 1 ほうれん草自動収穫装置の主要諸元(カイシン工業株式会社)
これは、ほうれん草同士が互いに支えあった状態を保たせることによって実現している。さらに、収穫されたほうれん草には傷や折れがほとんどなく、ロスも非常に少ない。上部に搬送されたほうれん草は、一旦コンテナ等に格納して調製工場に運搬することを想定している。そのため、コンテナ詰めは立ち作業が可能なように工夫した装置形態として実現している。
図4の根切り装置では、根切り刃を土中進行させて根を切るだけの機能をもつ。図4によれば、根切り後のほうれん草は依然として直立した状態を保っているため、人手によっても容易に回収できるなど、作業性の向上が図れる。そのため、しゃがみ込んだ状態での作業時間を大幅に短縮でき、軽労化に寄与する装置となっている。

図 4 自動根切り装置(カイシン工業株式会社)
また、自動収穫装置に比較して装備も簡素であることから実現コストも低い。これらの装置を用いて自動収穫したほうれん草の例を図5に示す。圃場試験は長野県の雨除け付きハウスで実施した。図5のとおり、根切りの状態は安定しており、茎を切るなどの切り損じが生じることはほとんど見られない。

図 5 自動装置で根切りされたほうれん草
また、露地生産のほうれん草や小松菜の自動収穫試験も実施しており、自動収穫可能な圃場状態を調査することで適用範囲の拡大を目指している。おわりに新たな開発技術を活用したほうれん草自動収穫装置の開発例を紹介した。
カイシン工業株式会社で開発中の自動収穫装置は、販売開始目標を平成31年9月としており、現在、生産現場での評価試験を継続的に実施している。自動収穫装置による圃場評価試験等の問い合わせは下記まで。
■問い合わせ先
カイシン工業 株式会社
TEL:026-295-3451
E-mail:s.ooba@kaisin-g.jp
URL:http://kaisin-g.com/
※著者:信州大学、カイシン工業株式会社
あわせて読みたい記事





-120x120.jpg)














コメントを残す