
少子高齢化の流れを受け、収穫時の人手作業の軽減が農業経営における課題と考えられている。従来から大学や研究機関によるロボット技術の適用により、人手作業の低減への取り組みが成されてきたが、研究の域を出ず、実用化に向けての課題解決には至っていないと考えられてきた。
今回は自動車や食品製造の分野において確立されている人手作業の代替技術やノウハウを適用することで、課題を解決し、強い農業(経営)基盤の確立に寄与することを目指した。
開発の背景
全国で栽培されているトマトであるが、収穫時の人手作業の軽減が農業経営における課題と考えられており、トマト栽培コストのうち、人件費が50%を占める品種もあるとされている。コスト削減方法は収穫量を上げることの考え方もあるが、収穫を人手に頼っている以上は限界(さらなる夜間や休日就労は難しい)がある。
トマト収穫ロボットに求められる機能は昼夜を問わず連続して収穫を可能とするものであり、夜間や休日も収穫作業することで、生産者全体としての収穫量が上がり、結果としてコスト削減の効果が得られるものと考えられている。
従来からの大学や研究機関によるトマト収穫ロボットは、収穫するトマトの間にレールを敷設し、その上を走行させるタイプが多く、トマト収穫ロボット+レール施設費用が導入検討時のネックとなっていた。
また、近年はいわゆる施設園芸におけるレールヒーティング(暖房パイプ)の上を走行させるタイプも見受けられるが、このような施設でないと導入できない欠点があった。本開発においては、現状の栽培環境を変更せずに導入できる事を目指して「自律走行型トマト収穫ロボット」を開発した。
自律走行型トマト収穫ロボットとは
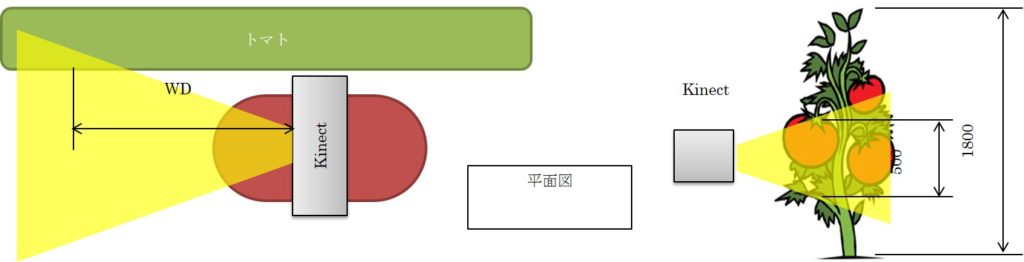
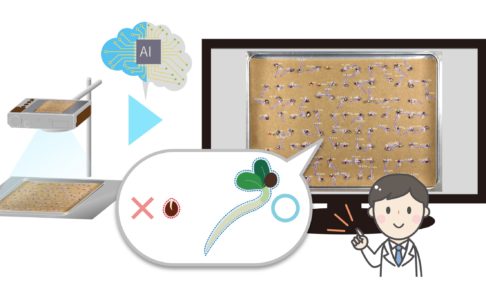
トマト収穫ロボットは、画像認識装置(Kinectセンサ Creativeセンサ)と四輪走行機能、平行開閉型ハンド・支点開閉型ハンド(トマトの品種によって変更する)によって構成される。
Kinectによりトマト全体を捉え、Creativeは収穫すべき個々のトマトを認識するように画像処理系を切り分けた。ハンドの機構は、収穫すべきトマトの茎を挟み込み、固定後、カッターでガク(ヘタ)の上部にある節部分で切断するものである。
※平行開閉型ハンド・支点開閉型ハンドのいずれにおいても、切断方法は同じ。


Creativeから見た、トマト画像
今後の展開について
開発を通じて明らかになった課題は大きく2つである。
➀画像認識系の課題
自然光下のハウス栽培における収穫を想定しているため、「外乱」対策が重要な要素である。現状の画像認識系では午前中の認識率は著しく低く、条件が悪いと10%以下の認識率となる。
一方、曇天時や午後の遅い時間の認識率は80%を超えており、画像センサの変更とアルゴリズムの再構築が重要な要素である。トマトに限らず、農作物の収穫においては Depth(深度)計測が重要であり、より、Depth 精度の高い画像センサの採用を予定している。
次号機においては、Ensenso-N30(IP65/67 対応)を3D Depthセンサ(Kinect センサの代替)として、IDS UI-5640RE-C-HO Rev.2をCreativeセンサの代替として採用を予定している。
➁走行系の課題
タイヤ方式では、ぬかるんだ農道や圃場においてタイヤが滑って走行ができない現象が発生した。駆動系の変更やタイヤの変更も実施したが、抜本的な解決には至らなかった。次号機においては、トピー工業製の全方位クローラに走行系を変更し、走行系の課題解決を予定している。
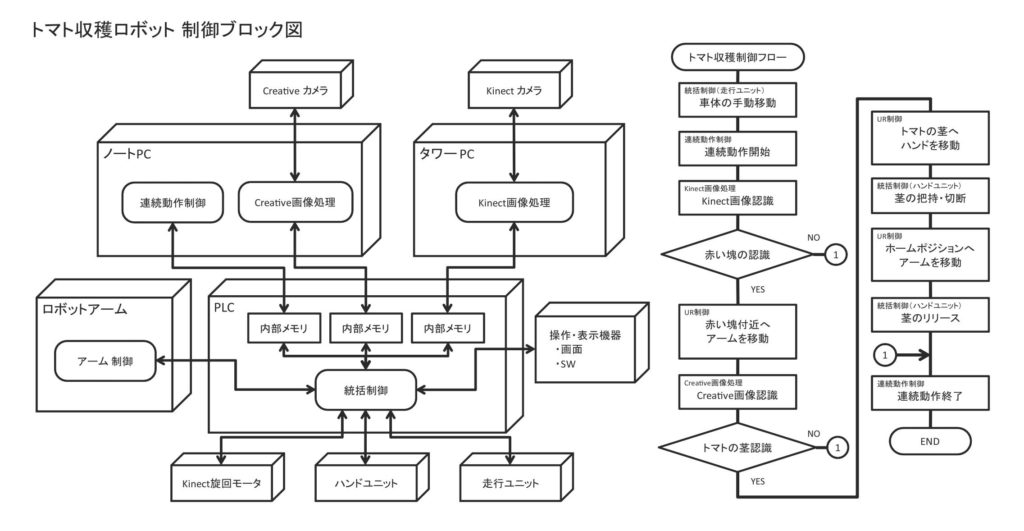
トマト収穫ロボット 制御ブロック図

ジュニアサミットでデモを実施した、初号機

トピー工業製全方位クローラ(プロトタイプ)
※スマート農業バイブル ―『見える化』で切り拓く経営&育成改革より転載
◎価格
要相談
Topics
平成28年4月23日(土)三重県桑名市NTN株式会社先端研究所内実験圃場において伊勢志摩サミットの併設事業であるジュニアサミット(G7 参加国の中高生で実施)視察においてデモ収穫を実施。わが国のロボット技術レベルの高さを国内外に示した。
◆相談先
スキューズ株式会社
TEL:075-694-0101
http://www.squse.co.jp/
あわせて読みたい記事




-120x120.jpg)


















コメントを残す