
マシンビジョン、円筒座標型マニピュレータ、エンドエフェクタおよびトレイ収容機構から構成される定置型イチゴ収穫ロボットを開発した。本ロボットは循環式イチゴ移動栽培装置と連動することで、ロボットの手前を通過する赤色果実を検出し、果柄を切断して収穫する。収穫成功率はおよそ40~80%であった。
循環式イチゴ移動栽培装置
単位面積当たりの収量を増加させるには、株当たりの収量を増加させること、面積当たりの栽植株数を増加させることの2つのアプローチがある 1)。前者として、品種改良による多収品種の育成や、栽培温度の制御による作期拡大などの研究が行われ、後者に対しては密植栽培システムの開発が行われている。本稿で紹介する循環式イチゴ移動栽培装置は、作業用の通路をすべてなくし栽培ベッドを循環移動させることで、栽植本数を増加させている 2、3)。
栽培装置は、制御ユニット、縦移送ユニット、横移送ユニット、かん水ユニット、防除ユニットから構成される。図1は農水省が推進する復興プロジェクト(略称名:先端プロ)の一環で、大規模施設園芸ハウス(宮城県山元町)に設置した移動栽培装置である。装置規模は縦13.5m、横7.7mで、栽培ベッド(長さ3.6m)を52台搭載できる。

図1 循環式イチゴ移動栽培装置(宮城県)
宮城県の南部地域には東日本大震災の前にイチゴハウスが96haあったが、津波でその95%が被災した。瓦礫が地中に残り地下水に塩分が混ざった。イチゴの根は塩分に弱いため、従来のようなイチゴの土耕栽培は放棄せざるを得なく、産地復興に向け「土耕から高設の養液栽培」への転換が図られ、現在は連棟ハウスが並んだ「イチゴ団地」が形成されている。
その一角に先端プロのプロジェクトサイトがある。栽培ベッドの初期位置は、左右の縦移送ユニットにそれぞれ25台満載され、手前と奥の横移送ユニットにそれぞれ1台ずつ搭載された状態である(図2)。
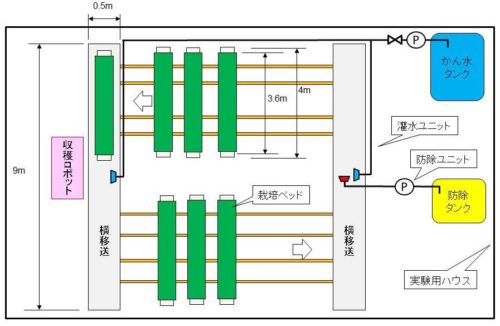
図2 移動栽培装置と収穫ロボットの配置
栽培ベッドは横方向に移送されたあと、縦移送ユニットにより長手方向に移送されることで初期位置に戻る。作業者は横移送ユニットの手前、つまり栽培施設の妻面で作業を行うことになる。作業位置の固定化により、以下3点のメリットが期待できる。
➀ハウス内を歩く必要がなくなる
➁暑熱環境が改善される
➂作業に適した資材のレイアウトができるなどのメリットが期待できる
効率的な作業を行うためには、次のベッドが作業者の前に来るまでのサイクル時間をできるだけ短くすることが重要で、収穫作業時間が装置規模を決定する第一要因になっている 4)。最新の装置ではサイクルタイムは24秒程度まで向上し、栽植本数13,300~16,700株/10a(慣行栽培の2倍)で栽培を行った。
定置型イチゴ収穫ロボットの開発
1)基本機構
定置型イチゴ収穫ロボットは、円筒座標型マニピュレータ、マシンビジョン、エンドエフェクタおよびトレイ収容部から構成され、移動栽培装置の横移送ユニット中央に設置される(図 2、3)。

図3 定置型イチゴ収穫ロボットと移動栽培との連動
マニピュレータの動作範囲は回転180°、昇降400mm、前後300mmである。マシンビジョンは、固定のCCDカメラ2台と、エンドエフェクタに取り付けたCCDカメラ1台に分けられ、CCDカメラ2台でステレオ画像処理を行い赤色果実の位置を推定し、ハンドアイカメラで果柄を検出する。
ステレオカメラをエンドエフェクタから分離独立させることで、採果後すぐに果実探索ができ、タイムロスを削減した。エンドエフェクタは、切断刃付き開閉フィンガと光電センサからなり、果柄の傾きに応じて左右に傾斜する。
2)収穫動作
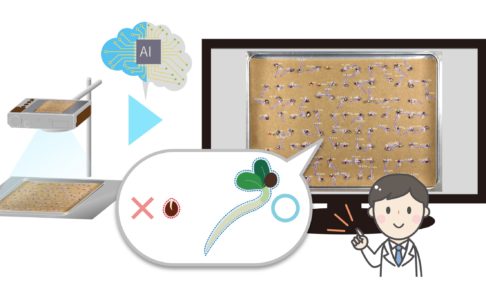
栽培ベッドの横移送中に、固定のステレオカメラで赤色果実の有無を走査して果実を検出すると、栽培ベッドを一時停止させエンドエフェクタ搭載カメラで着色度判定と果実の重なり判定を行う(図4)。収穫条件を満たせば、エンドエフェクタが果実に接近し、果柄を切断する(図5)。

図4 マシンビジョンによる果実と果柄の検出例
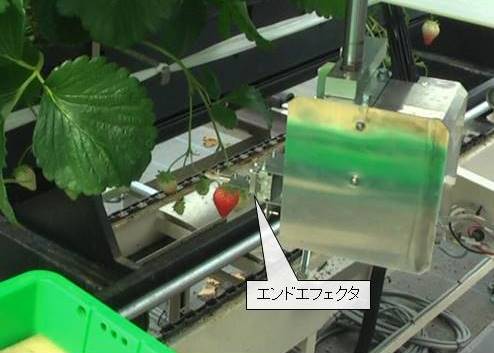
図5 エンドエフェクタによる果柄の切断・採果
果実が未熟であったり重なりがあったりすると、栽培ベッドを移動させ撮影角度を変えて再度判定し、収穫条件を満たせば採果する。農業研究が対象とする作物、農産物、土壌、家畜などは多様性に富んでいる。生育中のイチゴ果実の大きさや形状、着果状態は、収穫時期や栽培方法により大きく変化する。
これに対応するため、ロボットのマシンビジョンアプリケーションには慎重モードと積極モードを組み込んだ。慎重モードは果実の重なり判定を厳しくすることで、未熟果の誤収穫を低減する。一方積極モードは少しでも多くの果実を収穫したいときに適す。また、収穫ロボットが昼間に動作するアプリケーションも備えていて、収穫ロボットの稼動時間の拡大に寄与する。
3)収穫性能
収穫試験は、前述した移動栽培装置より小規模で、栽培ベッドを16台搭載できる栽培装置を用いて行った。品種による着色過程の違いが収穫適否の判定に影響することから、本試験では、赤色部と緑白色部の境界が比較的鮮明な品種「あまおとめ」(愛媛県育成)を供試した。1~6 月に亘って実施した性能試験において、収穫成功率は積極モードでおよそ40~80%であった。
ただし、着色度の判定ミスにより収穫適期前の果実を採果する場合もあった。収穫成功率は、栽培時期および果序が進むにつれて上昇する傾向が見られ、果房の入れ替わる前に高くなり、入れ替わると低下する傾向を示した。昼間試験で太陽光が果実に直射されると、ハレーションが発生し果実認識がほとんどできなかったが(20%以下)、暗幕で遮光することで認識が可能となった。時間当りの処理株数はおよそ300~400株/h(スキップする株も含む)であった。
おわりに
イチゴ収穫ロボットの開発では、生産者のもつ熟練的な知能をひとつひとつコンピュータに記述し、改良を繰り返してきた。まさに農業現場の土臭い技術開発である。一方で、人工知能の農業利用やスマート農業(ロボット技術やICTを活用して超省力で高品質生産を実現する新たな農業)の実現が叫ばれている近年、熟度判定の知能化など、収穫ロボットの技術開発も次のフェイズを迎えることになろう。
本稿で紹介した取り組みが、スマート農業を推進する方々の一助になれば幸いである。本研究の一部は、農水省が推進する高性能農業機械の研究開発の一環として、「農業機械等緊急開発・実用化促進事業」のもと、シブヤ精機株式会社と共同開発したものである。
※スマート農業バイブル ―『見える化』で切り拓く経営&育成改革より転載
<参考文献>
1)池田英男:イチゴ高設栽培の導入と課題.農耕と園芸,61(9):14-16,2006
2)吉田啓孝 ほか:イチゴの高密植栽培のための移動栽培装置の開発. 農業機械学会誌,70(4):98-106,2008
3)Hayashi S et al.:Development of Circulating-Type Movable Bench System for Strawberry Cultivation.JARQ, 45(3):285-293, 2011
4)齋藤貞文ほか:イチゴ高密植移動栽培における作業性の調査と適正規模の導出.農業機械学会誌,74(6):457-464,2012
<価格>
・いちご収穫ロボット1台:5,000,000 円(オプション別)
・循環式イチゴ移動栽培装置:応相談
Tips
循環式イチゴ移動栽培装置単体の導入においても、定植や防除、収穫作業の省力化が可能です。
◆相談先
国立研究開発法人 農業・食品産業技術総合研究機構
農業技術革新工学研究センター
TEL:029-838-8914
HP:http://www.naro.affrc.go.jp/
あわせて読みたい記事















コメントを残す