

各種ロボットを開発する株式会社スマートロボティクスは、2019年10月より、ビニールハウスでのAI×自動走行型アームロボット「トマト自動収穫ロボット」の実証実験を開始した。
ロボット開発の背景
農作業の約半分を占める「収穫」の人手作業軽減に貢献するために、2018年11月より自動野菜収穫ロボットの企画及び設計開発に取り組んでいる。
収穫する作物は、「鈴なりで果実がなり、傷つきやすくサイズが小ぶり」といった性質から、難易度が高いと言われるミニトマトとした。
ロボットの概要
当社開発の自動野菜収穫ロボットは、ハウス内を自動的に移動しながら、ヘタが取れないようにミニトマトを収穫してカゴに詰めていく。
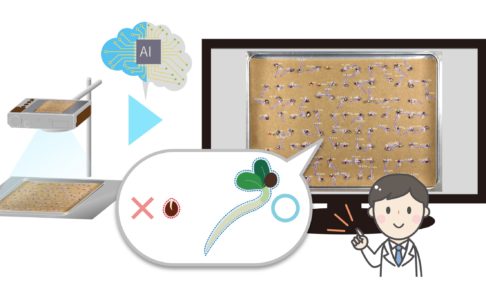
ロボットには、カメラや距離センサーが搭載されており、ディープラーニングによる画像認識などの技術を用いて、トマトの認識、サイズ判別や収穫判断を行っている。
ロボットハンドは自社で設計開発(※ 特許申請中技術)し、2019年3月にオフィス内に設置したミニトマト苗の収穫実験にて、1個あたりの収穫時間『約15秒』を実現した。
今後は、量産に向けたコストダウン、自動走行機能の改良、昼夜での認識機能の向上などを進めて、2020年春の実用化を目指す。
製品については、生産者様に導入コストの負担がかからないように、収穫時期のみ利用可能なレンタルを中心に提供させていただく予定である。
◆問い合わせ
株式会社スマートロボティクス
E-Mail:info@smartrobotics.jp
https://www.smartrobotics.jp/
あわせて読みたい記事
 AI×ロボットで農業界に変革を起こす inahoの取り組み
AI×ロボットで農業界に変革を起こす inahoの取り組み~野菜収穫ロボットで農家の稼ぐに貢献する~
 中古農機流通支援サイト「ノウキナビ」、販売登録者を認定販売店以外にも拡大
中古農機流通支援サイト「ノウキナビ」、販売登録者を認定販売店以外にも拡大
 国内初!inahoがRaaSモデルで自動野菜収穫ロボットのサービス提供を開始
国内初!inahoがRaaSモデルで自動野菜収穫ロボットのサービス提供を開始
 中山間地などに適したコンパクトでパワフルなトラクター「YT1シリーズ」を発売
中山間地などに適したコンパクトでパワフルなトラクター「YT1シリーズ」を発売
 自動直進機能を搭載した「直進アシスト田植機」を発売
自動直進機能を搭載した「直進アシスト田植機」を発売
 畑作管理作業に最適なトラクター「YT2シリーズ ハイクリアランス仕様」を発売
畑作管理作業に最適なトラクター「YT2シリーズ ハイクリアランス仕様」を発売
 運搬ロボットのDoog、スマート農業活用に向けた試験モデルの販売を開始
運搬ロボットのDoog、スマート農業活用に向けた試験モデルの販売を開始
 スマート農業界初!生産者が開発した生産者向け生産性管理SaaS型システム「Farm OS」発売開始
スマート農業界初!生産者が開発した生産者向け生産性管理SaaS型システム「Farm OS」発売開始

















コメントを残す