

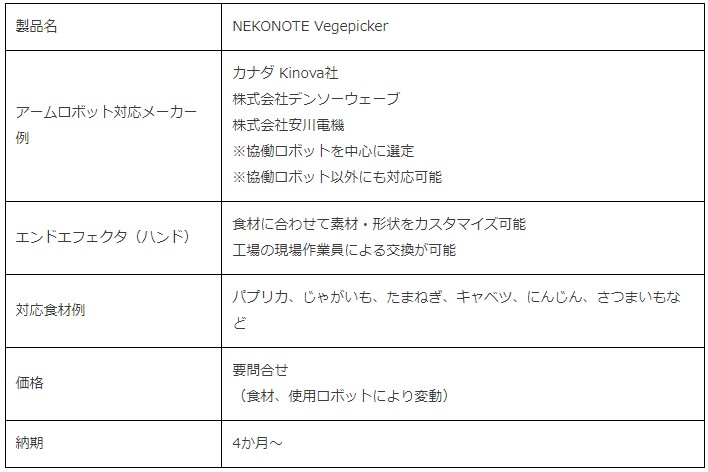
株式会社アールティ(以下アールティ)は、食品工場において人手による単純作業が負担になりがちな業務用フードスライサー等への野菜投入作業をロボットで自動化するため、認識する野菜の種類、ロボットの種類、ハンドの素材・形状を選んで、目的に応じた野菜投入ロボットをカスタマイズできるビジョン&ピッキングシステム「NEKONOTE Vegepicker」を開発した。
製品概要
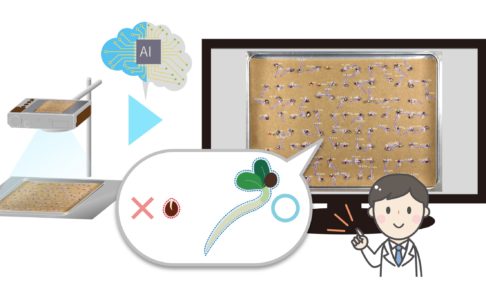
NEKONOTE Vegepicker(読み:ネコノテ ベジピッカー)は、食品工場における業務用フードスライサー等への野菜投入作業をロボットで自動化するためのソフトウェアシステムである。
本システムを実装したロボットは番重やコンテナにばら積みにした野菜の中からAIでひとつひとつを認識し、位置を自動検出してピッキングできる。
使用するアームロボットは、組み合わせるフードスライサーなどの大きさに応じて複数メーカの中から選定可能で、主に協働型のロボットに対応している。野菜の認識はロボットのアームや架台に設置したカメラで行い、カメラの位置や種類、数も目的用途に応じてカスタマイズ可能である。
ピッキングする野菜は1台に複数登録できる。野菜の大きさ、固さの違いにはエンドエフェクタ(ハンド)部分のパーツを付け替えることで対応し、ユーザーが簡単に交換できる形状としている。
従来のシステム開発であればロボットを指定して進める形が一般的であるが、本システムはそれらと異なり、特定の条件を満たしていればどのロボットに対しても自由にシステムの入れ替えができるため、工場の環境や組み合わせる機器のニーズに合わせてカスタマイズした製品を完全受注生産よりも早く安価に提供できる、新しいシステム開発の形となる。
製品外観・仕様

実装システム全体の外観例 (Kinova社 KINOVA Gen3使用)

交換可能なエンドエフェクタ
■NEKONOTE Vegepicker製品ページ
https://rt-net.jp/service/nekonote-vegepicker/
◆問い合わせ
株式会社アールティ
TEL:03-6666-2566
E-mail:info@rt-net.jp
https://rt-net.jp/
あわせて読みたい記事

























コメントを残す